
ICRA 2022 DodgeDrone Challenge: Vision-based Agile Drone Flight
Overview
Autonomous navigation in complex and dynamic environments is recognized one of the the Grand Challenges in today's robotics. While many advances have been made over the past years, autonomous systems still struggle to achieve the agility, versatility, and robustness of humans and animals. Why? What is the stumbling block? Thanks to their agility, widespread usage, and limited cost, drones are the perfect platform to investigate these questions. To incentivize and facilitate research on this topic, we are organizing the Vision-based Agile Drone Flight competition (aka DodgeDrone Challenge). In this competition, participants will develop perception and control algorithms to navigate a drone in both static and dynamic environments. Competing in the challenge will deepen your expertise in computer vision and control, and boost your research. We provide an easy-to-use API and a reinforcement learning framework. If you want to know more about our competition and research in aerial robotics, feel free to attend our two supporting workshops: The ICRA 2022 Aerial Robotics Workshop" and the ICRA 2022 Workshop on Releasing Robots into the Wild.
Final Results
We are happy to annouce the results of the finals! Congratulations to all teams for their fantastic job! The metric we used to rank teams is the time to reach the goal. In case of a collision, the time is automatically set to 60 seconds. The final score is the average of the time over 3 different environments. It is interesting to compare this results with the performance of a trained human pilot, who was able to complete the task (vision-based!) in 19.7 seconds! You can see the results breakdown on this page.| State-Based | ||
|---|---|---|
| Ranking | Team Name | Time |
| 1 | JSK Robotics | 43.1 (fastest: 9.3) |
| 2 | Team HNL | 60 |
| 3 | Finding Nimotsu | 60 |
| Vision-Based | ||
|---|---|---|
| Ranking | Team Name | Time |
| 1 | Delft Dodgers | 20.56 |
| 2 | Sentinel Delivery | 60 |
| 3 | Avader AGH | 60 |
Agenda (May 26 2022, Room 111B or online. Time reported in EDT.)
You can either attend the competition online on zoom or in person at ICRA in Room 111B. Please attend our event in person if you would like to fly the drone yourself!Session Morning:
10:00 - 10:15: Introduction.
10:15 - 12:00: Human Pilot Competition (The person with the lowest recorded time will be awarded swiss chocolate).
10:15 - 12:00 (in parallel to human): Finalist team can test their code.
Session Afternoon:
15:00 - 16:00: Autonomous Drone Racing Competition.
16:00 - 16:30: Presentation from the winning teams.
16:30 - 17:00: Panel Discussion and closing remarks.
Results
May 23: We are happy to annouce the results of our competition! Please attend our final events on Thursday May 26 Live at ICRA 2022 in Room 118B. Congratulations to all teams for their fantastic job! The metric we used to rank teams is the time to reach the goal. In case of a collision, the time is automatically set to 60 seconds. The final score is the sum of the time over 10 different environments.| State-Based | ||
|---|---|---|
| Ranking | Team Name | Time |
| 1 | JSK Robotics | 136.3 |
| 2 | Team HNL | 301.87 |
| 3 | Finding Nimotsu | 455.35 |
| 4 | Avader AGH | 486.25 |
| 5 | FinnDrone | 503.5 |
| 6 | Tsuji | 503.95 |
| 7 | LaRoCS | 530.65 |
| 8* | Team Charlie | 600 |
| 8* | AgileFlight-RL | 600 |
| 8* | Urobot-kaist | 600 |
| 8* | RoPAL | 600 |
| 8* | Morita | 600 |
| Vision-Based | ||
|---|---|---|
| Ranking | Team Name | Time |
| 1 | Delft Dodgers | 327.35 |
| 2 | Sentinel Delivery | 402.5 |
| 3 | Avader AGH | 516.5 |
| 4 | Team Alpha | 546.2 |
| 5 | Team Delta | 582.7 |
| 6 | Team Bravo | 600 |
How to Participate?
Please follow the instructions on GitHub. You can download the code and start building your algorithm. Also please sign up here if you intend to participate.
Submission
Submission is open! Please check submission instructions on our github repo. We will rank participants’ submissions according to two metrics: (i) success rate, indicating how many times the drone reaches a specified goal without crashing, and (ii) time, measuring how fast the drone arrives at the goal. All evaluation environments are unknown to the participants. Our competition will be divided in two stages: Selections and Finals.
The competition
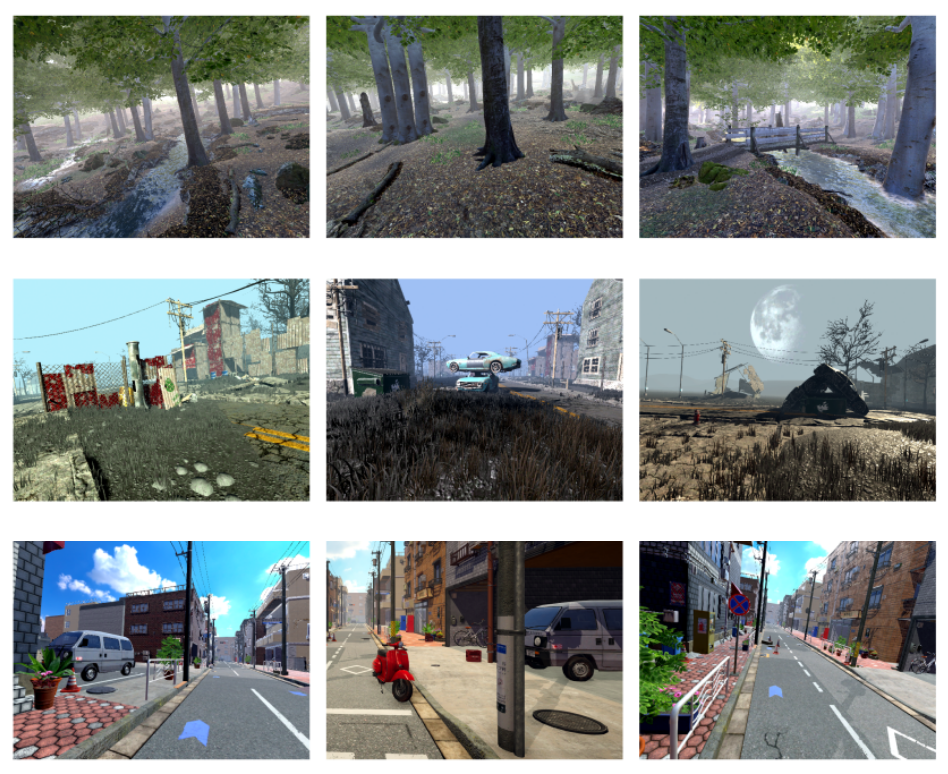
The competition consists of two challenges: (i) navigation in a static environment, and (ii) navigation in a dynamic environment. The main challenge of this competition is to develop a vision-based system that enables a quadrotor to fly in a list of simulated environments at high speeds, avoiding obstacles.
Rules
We will evaluate the submitted policies over 10 runs with a different seed, but keeping the enrivonment visual appearance constant. We will also keep the drone dynamics and physical parameters unchanged to the current version. For evaluation, we will consider policies with access to either explicit obstacle information or images (different rank will apply). Partecipants are free to use whatever input they like at training time, but should use the provided testing API at submission time. We will evaluate policies on a desktop machine with 12 core intel-i7 CPU and Nvidia Titan Xp 12Gb. The policy will need to run real time on such hardware.Assesment
We will rank participants’ submissions according to two metrics: (i) success rate, indicating how many times the drone reaches a specified goal without crashing, and (ii) time, measuring how fast the drone arrives at the goal. All evaluation environments are unknown to the participants. Our competition will be divided in two stages: Selections and Finals.
Selections
The selections will happen offline and take place before ICRA-2022. Results for this stage will be announced on the 23rd of May, 2022. The top three teams in the selection stage will be invited to the Finals.
Finals
The competition teams that reach the finals will compete live during the conference, while the first-person view of each competing drone is shown live on a big screen or beamer. This will take place during ICRA-2022 on the 26th of May, 2022. During the Finals, participants will compete both in a time-trial (basically, who gets faster to the goal) and in a multi-player challenge (which also requires avoiding and overtaking the other teams’ drone). The winner will be decided as an average score between the time trial and multi-player competition. Throughout the entire competition, there will be a speaker who leads through the program.
IMPORTANT DATES
Call for submissions opens: 16th March 2022 (AOE)Submission for selections: 15th May 2022 (AOE)
Finalist teams announced: 23rd May 2022 (AOE)
Finals: 26th May 2022 (Live in Philadephia)
Human-Piloted Competition and Chocolate-Bet
On the finals' day, anybody from the audience or partecipants could try to solve the challenge in manual flight mode. This gives an intuitive understanding of the difficulty of the problem. The best-performing human pilot of the day will be a reference baseline for the autonomous approaches.
During the finals, we will provide an online form, where the audience can bet on the following things: 1) winning team, 2) finishing time of the best team, and 3) if the winning approach is model-based or learning-based. Winners of each category will receive a piece of Swiss chocolate from our booth after the competition.
Awards
The 1st place winner will get a material or monetary prize of value 1000 USD (details will be announced closer to the competition day). In addition, the winner will be invited as a keynote speaker at the ICRA 2022 Workshop on Releasing Robots into the Wild.
Feel free to follow @antoniloq on Twitter for updates!



